Symmetry, Algebra and the Monster
Scott Martin for Quanta Magazine
Introduction
You could forgive mathematicians for being drawn to the monster group, an algebraic object so enormous and mysterious that it took them nearly a decade to prove it exists. Now, 30 years later, string theorists — physicists studying how all fundamental forces and particles might be explained by tiny strings vibrating in hidden dimensions — are looking to connect the monster to their physical questions. What is it about this collection of more than 1053 elements that excites both mathematicians and physicists? The study of algebraic groups like the monster helps make sense of the mathematical structures of symmetries, and hidden symmetries offer clues for building new physical theories. Group theory in many ways epitomizes mathematical abstraction, yet it underlies some of our most familiar mathematical experiences. Let’s explore the basics of symmetries and the algebra that illuminates their structure.
We are fond of saying things are symmetric, but what does that really mean? Intuitively we have a sense of symmetry as a kind of mirroring. Suppose we draw a vertical line through the middle of a square.
This line cuts the square into two equal parts, each of which is the mirror image of the other. This familiar example is called line symmetry. But there are other kinds of symmetry that have nothing to do with mirrors.
For example, the square also has rotational symmetry.
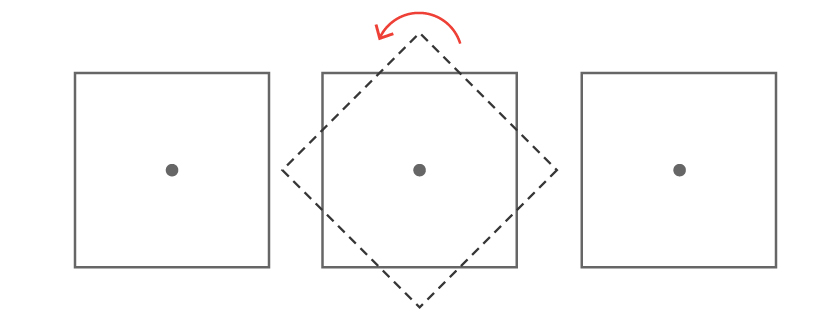
Here we see the process of rotating a square counterclockwise about its center point (the intersection of its diagonals). After it rotates 90 degrees (one quarter turn), it looks the same as before. It is this transformation of an object so that the result is indistinguishable from the original that defines a symmetry. The above rotation is one symmetry of the square, and our example of line symmetry can be thought of as another.
Let’s take a moment to define a few terms. We will call the original object the “pre-image” and the transformed object the “image,” and we will use the term “mapping” to refer to the process of transforming one object (a point, a segment, a square, etc.) into another. A symmetry requires that the transformation not alter the size or shape of the object. A transformation that meets this requirement is known as an “isometry,” or a rigid motion, and the fundamental isometries are reflection over a line, rotation about a point, and translation along a vector.
Now we can continue our analysis of the symmetries of a square. We know that one symmetry is “line reflection over the vertical line through the center”; another is “rotation about the center counterclockwise by 90 degrees.” Are there others? What are they, and how many are there? As is often the case in mathematics, planning ahead and good notation will make our analysis much easier.
First, suppose I told you that we had transformed the square via a symmetry and this was the result.
Which symmetry was applied? Was the square rotated? Was it reflected? Of course it’s impossible to tell, precisely because of the criteria for a symmetry. To help us identify specific symmetries, let’s start by labeling the vertices of the original square.
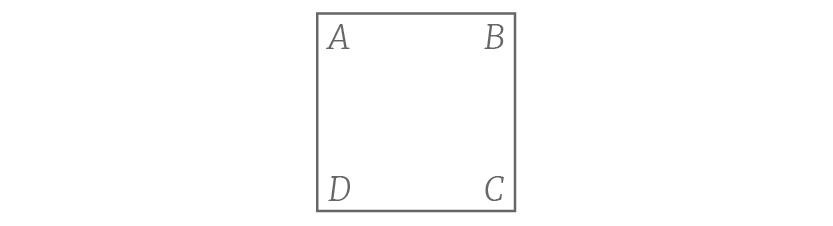
Further, let’s agree that whenever we picture the original square, we will always imagine it to be labeled like this: The top left corner is A, the top right is B, the bottom right is C, and the bottom left is D.
Now when we transform the square, we can watch where the labels go. For example, after reflection through the vertical line through the center, the image of the square looks like this:
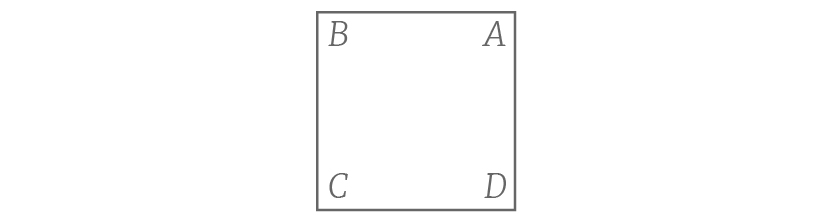
Relative to the original labeling, A is now in the B position and B is now in the A position. Similarly, C and D have exchanged positions. Taking the original labeling as ABCD, we denote the new labeling resulting from this transformation as BADC. This communicates that, under this transformation, A is mapped to B, B is mapped to A, C is mapped to D, and D is mapped to C. We can visualize how the notation works in the following way:

We will always take the starting position to be ABCD, so the relative position in the list describes where each original vertex is mapped under the transformation. As another example, our rotation by 90 degrees counterclockwise would be denoted DABC, as A is mapped to D, B is mapped to A, and so on.
Technically, this only describes what happens to the corners under a transformation, but as it turns out, this is enough to describe what happens to the entire square. That’s because symmetries are isometries, which preserve the size and shape of the object. An isometry can’t flatten out a corner, or vertex, as that would change the object’s shape. This means the corners A, B, C and D all have to get mapped to corners. Similarly, the properties of isometries guarantee that line segments get mapped to line segments. And so, once we know where the corners of the square go, the sides come along for the ride. In other words, the image of a side of the square is determined by the image of the vertices that are its endpoints.
This means we can completely specify a symmetry of the square by some arrangement of the four letters A, B, C and D. This is remarkable in and of itself, but it also immediately implies an upper bound on the number of symmetries of the square: There are no more symmetries of the square than there are arrangements of those four letters. How many such arrangements are there?
Think about creating an arrangement of these letters. You can start with any of the four, but once you choose a letter to start with, you have only three choices for the second. Once you choose a second letter, you’ll have only two choices for the third, and finally there will be only one option for the fourth letter. An elementary counting argument tells us there are then
4 × 3 × 2 × 1 (= 4!) = 24
possible arrangements of the letters A, B, C and D. Thus, there are at most 24 symmetries of the square.
In fact, the square has far fewer than 24 symmetries, and one more simple argument will show us why. Let’s return to our original diagram. Suppose we know that a symmetry of the square maps A to B. Where can C go?
The answer is that C can only be mapped to D. A and C are endpoints of a diagonal of the square. Since isometries don’t alter size, the distance between A and C must be the same before and after the mapping. If A is mapped to B, there is only one point on the square that is a diagonal’s length away from where A is now, namely D. That is where C must go.
This greatly reduces the number of possible symmetries of a square. Suppose we construct a symmetry; how many possibilities are there for where point A ends up? Since vertices must go to vertices, there are only four possibilities for the image of A. And once we’ve chosen a destination for A, there is only one possibility for the destination of C: the vertex diagonal to the image of A. This leaves only two choices for B, and a similar argument shows there will be only one choice for D.
Ultimately, in determining a symmetry of the square, there are really only two things to decide: where A goes (four choices) and where B goes (two choices). That means there are only 4 × 2 = 8 possible symmetries of the square. Here’s a complete list, using our notation:
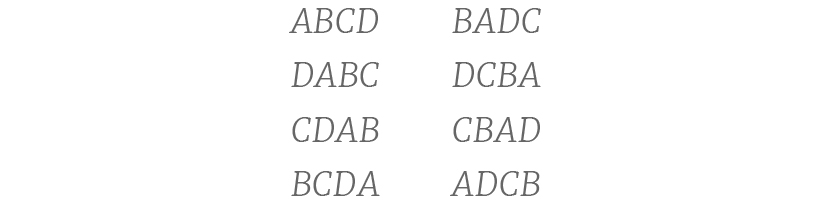
Now, we aren’t guaranteed that all eight possibilities are actual symmetries of the square. But it’s a small list, so we can check them and verify that, indeed, they all correspond to legitimate symmetries: the four on the left are rotations (by 0, 90, 180 and 270 degrees), and the four on the right are reflections (two by vertical and horizontal lines, two by diagonal lines).
So these eight transformations are all symmetries, and since we’ve established that a square has at most eight symmetries, apparently we’ve found them all. But can this really be all of them?
One concern arises when we notice a natural way to combine symmetries: We can simply apply them in succession (an operation on transformations called “composition”). Since applying a symmetry to the square gives us the same square again, you could apply another symmetry, which would produce the same square yet again. This means that if you apply multiple symmetries in succession, the composition of those symmetries is itself a symmetry of the square! We could potentially generate new symmetries of the square through various combinations of the above eight.
But something interesting happens when we try that. Suppose we rotate the square by 90 degrees counterclockwise and then reflect it over the vertical line through the center. What happens to the vertices? The rotation takes A to D, and then the reflection takes it to C, so ultimately A goes to C. B rotates to A, then gets reflected back to B, so B is mapped to B. C gets rotated to B then reflected to A, and D gets rotated to C, then reflected back to D. In our adopted notation, the composition of these two transformations can be described as
![]()
But this symmetry is already on our list! Rotation by 90 degrees counterclockwise followed by reflection over the vertical line through the center is actually reflection about the diagonal line BD. As it turns out, every combination of the eight symmetries above is itself one of the eight symmetries above.
Now we’ve exposed the underlying algebraic structure inherent in this set of symmetries. When we combine two symmetries through composition, we get another symmetry, in much the same way that we combine two numbers through addition to get another number. There is an identity symmetry (rotation by 0 degrees) that acts just as the number zero acts in our number system. And every symmetry can be undone, just as adding 3 can be undone by adding –3: For example, rotating the square by 90 degrees can be undone by rotating the square by another 270 degrees.
These are the essential algebraic properties of groups, and they endow groups, like the set of symmetries of the square, with a structure and a regularity akin to those of our familiar number systems. Yet groups of symmetries also exhibit their own complex and subtle characteristics. For example, our group of symmetries of the square contains only eight elements, a stark contrast to our infinite number systems. And while we can combine symmetries in a manner similar to the way we add numbers, the order in which we combine them makes a difference: 3 + 4 = 4 + 3, but reflection followed by rotation is not necessarily the same as rotation followed by reflection.
We’ve gotten a glimpse of the algebraic structure underlying the simple symmetries of the square. What will mathematicians and string theorists find lurking in the depths of the monster?
Download the “Counting Symmetries” PDF worksheet and watch the following video about how symmetries shape nature’s laws.
This article was reprinted on Wired.com.